
Prototype
Confidential
Development of a Biomimetic Autonomous Underwater Vehicle whose design is based on Tuna Fish capable of underwater surveillance. Designed the electronics for the system, creating ROS package for ROS-based communication. Designing a Rule Based Dynamic Thresholding Fault Detection (RBDTFD) algorithm for fault detection and control algorithm for Orientation control.
Developed under the guidance of Dr. Asokan Thondiyath, IIT Madras
Confidential
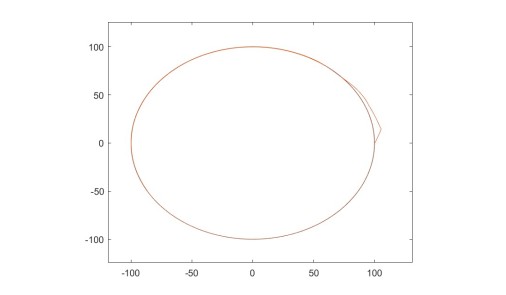
Designed and Simulated the control algorithm for moving the bot in circular trajectory