Sourav Selvaraj
Humanoid Robotic System (HuRoS)
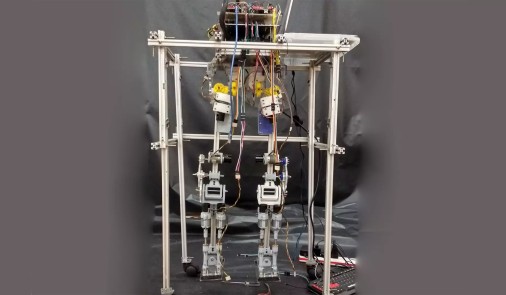
Objective
A 10-DOF stable, static walking Bipedal robot capable of traversing on plane surfaces and tolerant to external disturbances. Conducting a thorough literature survey on bipedal robot designs, control algorithms, and electronic integration to gain a deep understanding of the state-of-the-art advancements. In works to develop custom electronic circuits to control motors, sensors, and feedback systems, ensuring precise motion and stability during locomotion.
Tech Stack