Sourav Selvaraj
Viirya, The Rover
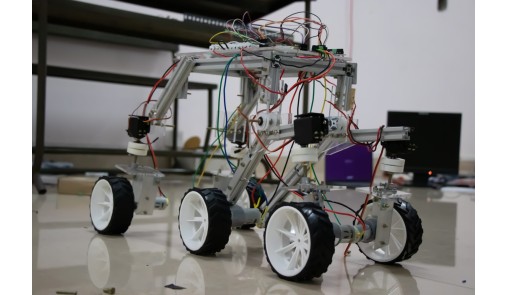
Objective
A 6-wheeled autonomous ground-based robot with adjustable rocker-bogie suspension having the ability to move through wireless and battery control. The rover will also be able to map the terrain it transverses with the help of sensors such as a camera and LIDAR providing valuable terrain information. Working on chassis building, electronics and control algorithm of the rover.
Tech Stack